Wetenschap
Lastig terrein:helpen om een veilige landing van de rover te verzekeren

De Perseverance-rover van Mars 2020 is uitgerust met een lander vision-systeem op basis van terrein-relatieve navigatie, een geavanceerde methode om autonoom realtime beelden te vergelijken met vooraf geladen kaarten die de positie van de rover bepalen ten opzichte van gevaren in het landingsgebied. Omleidingsalgoritmen en -software kunnen de rover vervolgens indien nodig om die obstakels sturen. Krediet:NASA/JPL-Caltech
Na een reis van bijna zeven maanden naar Mars, NASA's Perseverance-rover zal op 18 februari landen op de Jezero-krater van de Rode Planeet, 2021, een ruige uitgestrektheid gekozen vanwege zijn wetenschappelijk onderzoek en mogelijkheden voor het verzamelen van monsters.
Maar juist de kenmerken die de site fascinerend maken voor wetenschappers, maken het ook een relatief gevaarlijke plek om te landen - een uitdaging die heeft geleid tot rigoureuze tests hier op aarde voor het lander vision-systeem (LVS) waarop de rover zal rekenen om veilig te landen.
"Jezero is 28 mijl breed, maar binnen die uitgestrektheid zijn er veel potentiële gevaren die de rover kan tegenkomen:heuvels, rotsvelden, duinen, de wanden van de krater zelf, om er een paar op te noemen, " zei Andrew Johnson, belangrijkste robotica-systeemingenieur bij NASA's Jet Propulsion Laboratory in Zuid-Californië. "Dus, als je op een van die gevaren belandt, het zou catastrofaal kunnen zijn voor de hele missie."
Voer Terrain-Relative Navigation (TRN) in, de missiekritieke technologie in het hart van de LVS die foto's van het Mars-terrein in realtime vastlegt en deze vergelijkt met kaarten aan boord van het landingsgebied, autonoom de rover sturen om bekende gevaren en obstakels te omzeilen als dat nodig is.
"Voor maart 2020, LVS zal de positie-informatie gebruiken om erachter te komen waar de rover zich bevindt ten opzichte van veilige plekken tussen die gevaren. En op een van die veilige plekken zal de rover landen, " legde Johnson uit.
Als Johnson er zeker van klinkt dat LVS zal werken om Perseverance veilig te landen, dat komt omdat het de rover in staat stelt zijn positie ten opzichte van de grond te bepalen met een nauwkeurigheid van ongeveer 200 voet of minder. Die lage foutenmarge en hoge mate van zekerheid zijn inherent en het resultaat van uitgebreide testen zowel in het lab als in het veld.
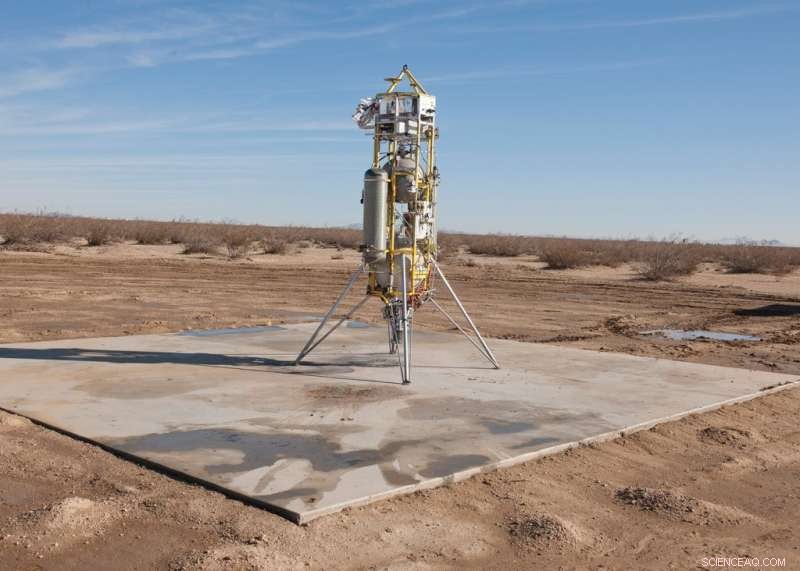
Het Xombie VTVL-systeem van Masten staat op een lanceerplatform in Mojave, Californië in december 2014, voorbereid op een vluchttest die zou helpen de capaciteiten van het lander vision-systeem te bewijzen voor de Mars 2020 Perseverance rover-missie. Krediet:Masten Space Systems
"We hebben wat we de trifecta van testen noemen, " legde JPL's Swati Mohan uit, de begeleiding, navigatie, en controleactiviteiten leiden voor Mars 2020.
Mohan zei dat de eerste twee testgebieden - hardware en simulatie - in een laboratorium werden gedaan.
"Daar testen we elke conditie en variabele die we kunnen. Vacuüm, trillingen, temperatuur, elektrische compatibiliteit:we stellen de hardware op de proef, "zei Mohan. "Dan met simulatie, we modelleren verschillende scenario's die de software-algoritmen op Mars kunnen tegenkomen - een te zonnige dag, zeer donkere dag, winderige dag - en we zorgen ervoor dat het systeem zich gedraagt zoals verwacht, ongeacht die omstandigheden."
Maar het derde deel van de trifecta - de veldtesten - vereist daadwerkelijke vluchten om de laboratoriumresultaten verder te strengen en een hoog niveau van technische paraatheid voor NASA-missies te bieden. Voor de vroege vliegtests van LVS, Johnson en team monteerden de LVS op een helikopter en gebruikten deze om automatisch de positie van het voertuig in te schatten terwijl het vloog.
"Dat bracht ons tot een bepaald niveau van technische paraatheid omdat het systeem een breed scala aan terreinen kon monitoren, maar het had niet dezelfde soort afkomst die Perseverance zal hebben, "zei Johnson. "Er was ook behoefte om LVS op een raket te demonstreren."
Aan die behoefte werd voldaan door NASA's Flight Opportunities-programma, die in 2014 twee vluchten in de Mojave-woestijn mogelijk maakte op de Xombie van Masten Space Systems - een systeem voor verticaal opstijgen en verticaal landen (VTVL) dat op dezelfde manier werkt als een lander. De vliegtests toonden het vermogen van LVS aan om Xombie ertoe te brengen autonoom van koers te veranderen en gevaren bij de afdaling te vermijden door een nieuw berekend pad naar een veilige landingsplaats aan te nemen. Eerdere vluchten op het VTVL-systeem van Masten hielpen ook bij het valideren van algoritmen en software die werden gebruikt om brandstofoptimale trajecten voor planetaire landingen te berekenen.
"Het testen op de raket legde vrijwel alle resterende twijfels op en beantwoordde een kritische vraag voor de LVS-operatie bevestigend, " zei Nikolas Trawny van JPL, een ingenieur voor laadvermogen en besturingssystemen die nauw samenwerkte met Masten tijdens de veldtests van 2014. "Het was toen dat we wisten dat LVS zou werken tijdens de snelle verticale afdaling die typisch is voor Mars-landingen."
Johnson voegde eraan toe dat de suborbitaltests in feite het technologische gereedheidsniveau verhoogden om het definitieve groene licht voor acceptatie in de Mars 2020-missie te krijgen.
"De tests waarvoor Flight Opportunities is opgezet, waren destijds echt ongekend binnen NASA, "zei Johnson. "Maar het is zo waardevol gebleken dat er nu van wordt verwacht dat het dit soort vliegtesten doet. Voor LVS, die raketvluchten waren het sluitstuk van onze inspanningen op het gebied van technologische ontwikkeling."
Met de technologie geaccepteerd voor Mars 2020, het missieteam begon met het bouwen van de definitieve versie van LVS die op Perseverance zou vliegen. in 2019, een kopie van dat systeem vloog nog een helikopterdemonstratie in Death Valley, Californië, gefaciliteerd door NASA's Technology Demonstration Missions-programma. De helikoptervlucht vormde een laatste controle op meer dan zes jaar van meerdere veldtesten.
Maar Mohan wees erop dat zelfs met deze succesvolle demonstraties, er zal meer werk moeten worden verzet om een veilige landing te garanderen. Ze zal bij Mission Control zijn voor de landing, het bewaken van de gezondheid van het systeem bij elke stap.
"Het echte leven kan je altijd kromme ballen gooien. Dus, we houden alles in de gaten tijdens de cruisefase, de voeding naar de camera controleren, ervoor zorgen dat de gegevens stromen zoals verwacht, ' zei Mohan. 'En zodra we dat signaal krijgen van de rover die zegt:'Ik ben geland en ik ben op stabiele grond, ' dan kunnen we vieren."
 Lijst vijf soorten sneeuwkristallen
Lijst vijf soorten sneeuwkristallen- Een materiaalwetenschappelijke benadering van de bestrijding van het coronavirus
- Saptechniek kan de gezondheid van vers geperst sap beïnvloeden
- Hoe de evenwichtige chemische reactie voor het roesten van ijzer te schrijven
- Ooggestuurde zachte lens maakt de weg vrij voor zachte mens-machine-interfaces
- Afbeelding:NASA's IceBridge sluit de Noordpoolcampagne van 2017 af met een vlucht naar Zuid-Groenland
- Het verminderen van de uitstoot van zwaveldioxide alleen kan de luchtvervuiling niet substantieel verminderen
- Bosbodem heeft decennia of eeuwen nodig om te herstellen van branden en houtkap
- Wat is de luchtvochtigheid van de Mojave-woestijn?
- Het proces van Papyrus tot Papers in het oude Egypte
Hoofdlijnen
- Hoe maak je een plantencelmodel op stap-voor-stap
- Wat gebeurt er met een diercel wanneer deze zich in een hypotone oplossing bevindt?
- Maatregelen voor welzijn en duurzaamheid heroverwegen van lokale naar mondiale schaal
- Make-up en wetenschap Eerlijke ideeën
- Een sleutel vinden om geblokkeerde differentiatie in microRNA-deficiënte embryonale stamcellen te ontgrendelen
- Het verschil tussen prokaryote en eukaryotische genexpressie
- Parasitaire ooginfectie vormt een aanzienlijke bedreiging voor Britse honden, waarschuw experts
- Wat doen basale lichamen die Cilia en Flagella vormen?
- Waarom zou een cel veel rRNA maken, maar slechts één exemplaar van DNA?
- Hoe NASA's Spitzer zo lang in leven is gebleven
- Eerdere NASA-chefs komen samen voor 60-jarig jubileum van ruimteagentschappen

- Grote ideeën in kleine verpakkingen:de zaden en wormen vinden hun weg naar het ISS

- Een Titan-missie kan ter plaatse bijtanken en een monster naar de aarde terugbrengen

- Water dat veel voorkomt, maar toch schaars is op exoplaneten

 Methaanemissies op wereldschaal in kaart brengen
Methaanemissies op wereldschaal in kaart brengen- Stadsgrootte speelt cruciale rol in migratiepatronen
- Nanotechnologie:lacht overal
- De 3D-vorm van moleculen ontdekken met een druk op de knop
- Productie van open-mesoporeuze koolstofnanovezels voor flexibele en draagbare stroombronnen
- Saoedi's zeggen 12, 000 piratenapparaten in beslag genomen te midden van rift in Qatar
- Water vervangt gifstoffen:groene productie van plastic
- Ontbrekende oude Mesopotamische artefacten in beslag genomen in Noorwegen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | German | Dutch | Norway | Swedish | Danish |

-
Wetenschap © https://nl.scienceaq.com
