Wetenschap
Gedeelde controle stelt een robot in staat om twee handen te gebruiken die samenwerken om taken uit te voeren
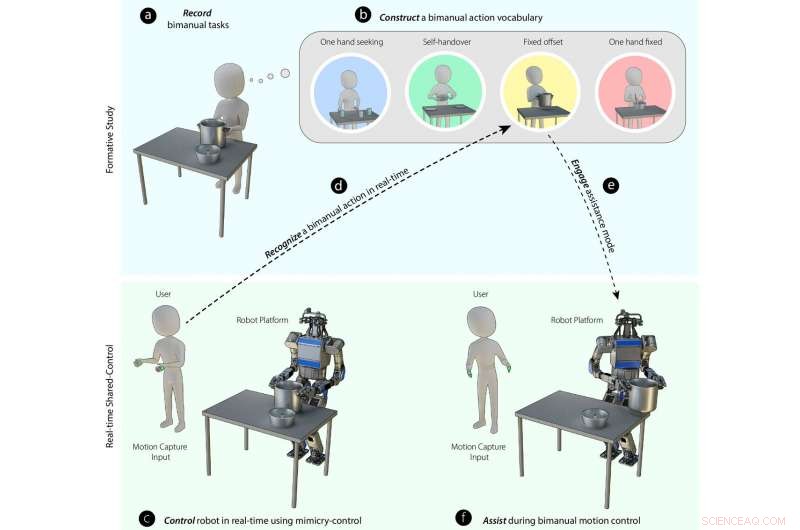
Diagram ter illustratie van het experimentele ontwerp voor bimanuele robotmanipulatie. Een "bimanuele actievocabulaire" voor robots werd ontwikkeld op basis van een uitgebreide analyse van menselijke bimanuele hand- en armbewegingen (bovenste paneel met het label "formatieve studie"). Een robot geprogrammeerd met een neuraal netwerk en een bimanuele actiewoordenschat was gekoppeld aan een vrijwilliger die probeerde de robot te besturen om verschillende bimanuele taken uit te voeren. De robot legde de houdingen van de mens vast en leidde de juiste beweging af door te putten uit zijn bimanuele vocabulaire. Krediet:Rakita et al., Wetenschap. Robot . 4, eaaw0955 (2019)
Een team van onderzoekers van de Universiteit van Wisconsin en het Naval Research Laboratory heeft een robotsysteem ontworpen en gebouwd dat bimanuele robotmanipulatie mogelijk maakt door middel van gedeelde controle. In hun artikel gepubliceerd in het tijdschrift Wetenschap Robotica , de groep legt de ideeën achter hun werk uit en hoe goed ze in de praktijk werkten.
Zoals de onderzoekers opmerken, het is erg ingewikkeld om twee handen samen te gebruiken om een taak uit te voeren - het houdt veel meer in dan alleen twee individuele handen die onafhankelijk van elkaar aan dezelfde taak werken. Als iemand een pot opent, bijvoorbeeld, de hersenen moeten als een soort bemiddelaar dienen, het sturen van de actie terwijl het signalen ontvangt en naar beide handen stuurt. Zulke eenvoudige taken zijn zo ingewikkeld dat robots ze niet kunnen uitvoeren - daarom werken vrijwel alle robots met slechts één hand. In deze nieuwe poging de onderzoekers hebben een kleine stap gezet in de richting van het aanleren van robots om twee handen te gebruiken om een taak uit te voeren.
De onderzoekers merken op dat veel semi-robottoepassingen robots in staat stellen om een augmentatierol te vervullen, in plaats van zelf iets te doen. Een chirurg die een robothand bestuurt door zijn eigen hand te gebruiken, is een voorbeeld. Maar ze merken ook op dat eenvoudige mimicry niet zou werken voor augmented robotsystemen met twee handen - dergelijke bewegingen zijn te complex. De oplossing, ze vonden, was om mimicry te combineren met een deep learning netwerk. Het resultaat was een techniek waarmee een robot bimanuele taken kon uitvoeren door de controle te delen met een mens.
Het werk begon met het uitrusten van een robot met twee armen en handen. Ze voegden hardware toe om de robotarmen te laten communiceren met een deep learning-netwerk en sensoren die op een mens zijn geplaatst. Een robot kreeg te horen welke taak zou worden geprobeerd, en toen voerde de mens het uit. Zoals de mens dat deed, de robot deed zijn best om de actie tegelijkertijd na te bootsen. Door de procedure vele malen te herhalen, kon de robot leren over de vele kleine taken die betrokken waren bij het uitvoeren van de hoofdtaak, wat leidde tot enige intuïtie van zijn kant.
Overuren, zoals een robot samenwerkte met een mens, het heeft zijn eigen commando's toegevoegd om een beter resultaat te bereiken. De robot ging niet zover dat hij de taak alleen kon uitvoeren - in plaats daarvan, het leerde om te dienen als een meer volledig capabele augmented assistent. De onderzoekers merken op dat zo'n robot mogelijk als assistent kan dienen voor gedeeltelijk arbeidsongeschikten. Ook, het lijkt erop dat de marine zo'n robot zou kunnen gebruiken voor onderwateroperaties op afstand.
© 2019 Wetenschap X Netwerk
 Feiten over Wisconsin Fast Plants
Feiten over Wisconsin Fast Plants- Hoe werkt een GPS-zender bij het bestuderen van plaatbewegingen?
- De impact van een aardbeving kan worden beïnvloed door seizoensfactoren, historische studie toont
- 11% kans op een nieuwe enorme aardbeving in Zuid-Californië, wetenschappers zeggen:
- NASA-analyse toont zware regenval in tyfoon Bualoi
Hoofdlijnen
- De rol van ribosomen in Homeostasis
- Cheerleaders helpen bij het ontdekken van bacteriën die beter groeien zonder zwaartekracht
- Wetenschapsprojecten: een skelet maken
- Twee eiwitten behouden de pluripotentie van embryonale stamcellen op verschillende manieren
- Een signaalroute die de vorming van een splitsingsgroef beperkt tot het middenvlak van de cel
- Rechtbank vindt het goed om een soort uil te doden om het effect op andere uilen te zien
- Wetenschappers stellen universele wetten voor over de grootte en biologie van plantenzaden
- Bepaling van allelfrequenties
- Wat is de levensduur van huidcellen?
- Onderzoeker ziet potentie in het opwekken van energie uit trillingen

- Technologie voor het visualiseren van de bloedstroom ter ondersteuning van neurochirurgie in het menselijk brein

- Stanford Doggo:een zeer wendbare viervoeter
- Kernenergie kan de rol zien afnemen, VN-agentschap zegt:

- Apple neemt het op tegen Netflix met een streamingdienst van $ 5 per maand


 Kerntechnologie voor ultrakleine 3D-beeldsensor
Kerntechnologie voor ultrakleine 3D-beeldsensor- Veranderingen in droge gebieden met toekomstige klimaatverandering
- British Museum om 's werelds oudste kaart met sterren weer te geven
- Nieuwe methode voor het gebruik van spingolven in magnetische materialen
- Smalle plasmonische oppervlakteroosterresonanties geven de voorkeur aan een asymmetrische diëlektrische omgeving
- Wetenschappers pionieren met nieuw chemisch conversieproces bij lage temperatuur
- Een praktische blik op Googles Stadia-cloudgameservice
- Een fabriek om te gaan
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
